NewKer-i8

NEWker-i8 Bus absolute type Industrial robot controller
NEWker-i4-8: 4-8 axis bus absolute type industrial robot controller
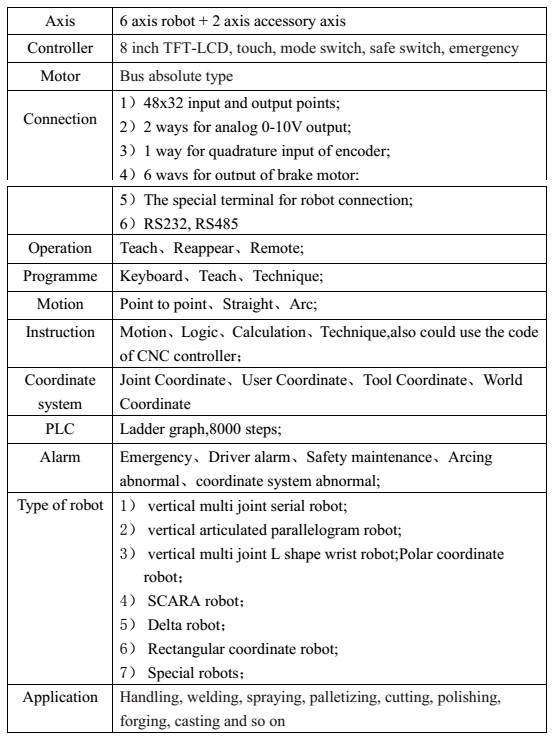
NEWker-i8 robot controller use the international embedded bus type,the controlling circuit use the newest industrial high speed ARM CPU、 Mass programming FPGA technology, multilayer PCB, the whole machine adopts high integration chip and surface mount element, the structure is more compact and reasonable, and better ensure the reliability and stability of the system.The software is module designed, to suit the different structure, industrial application requirements.The robot controller can realize vertical multi joint robot,vertical articulated parallelogram robot, vertical multi joint robot, L wrist shaped vertical multi joint robot, spherical wrist robot, Delta robot ,pole coordinate robot and so many kinds. It is widely used and could be worked in handling, welding, spraying, palletizing, cutting, polishing,welding and so on. The controller adopts bus structure with absolute motors, simple structure, practical and reliable.Use 800X600 TFT LCD technology, LED got uniform brightness and long service life.
Functional Characteristics
1) Structure optimization algorithm, adapt to the various kinds ofrobot;
2) Modular functions, to adapt to a variety ofapplications;
3) 8 axis control, could realize the auxiliary axis(walking axis, position control);
4) Adapt multi loop absolute motor;
5) Embedded bus type, easy and expand function;
6) 48x32 input and output points,edit PLC online;
7) all kinds of robot process function, simplify the programming and operation;
8) TCP function, tracking function ofweld seam; 9) Security module structure, strong practicability, high reliability.